物理 达郎贝尔方程与理想约束
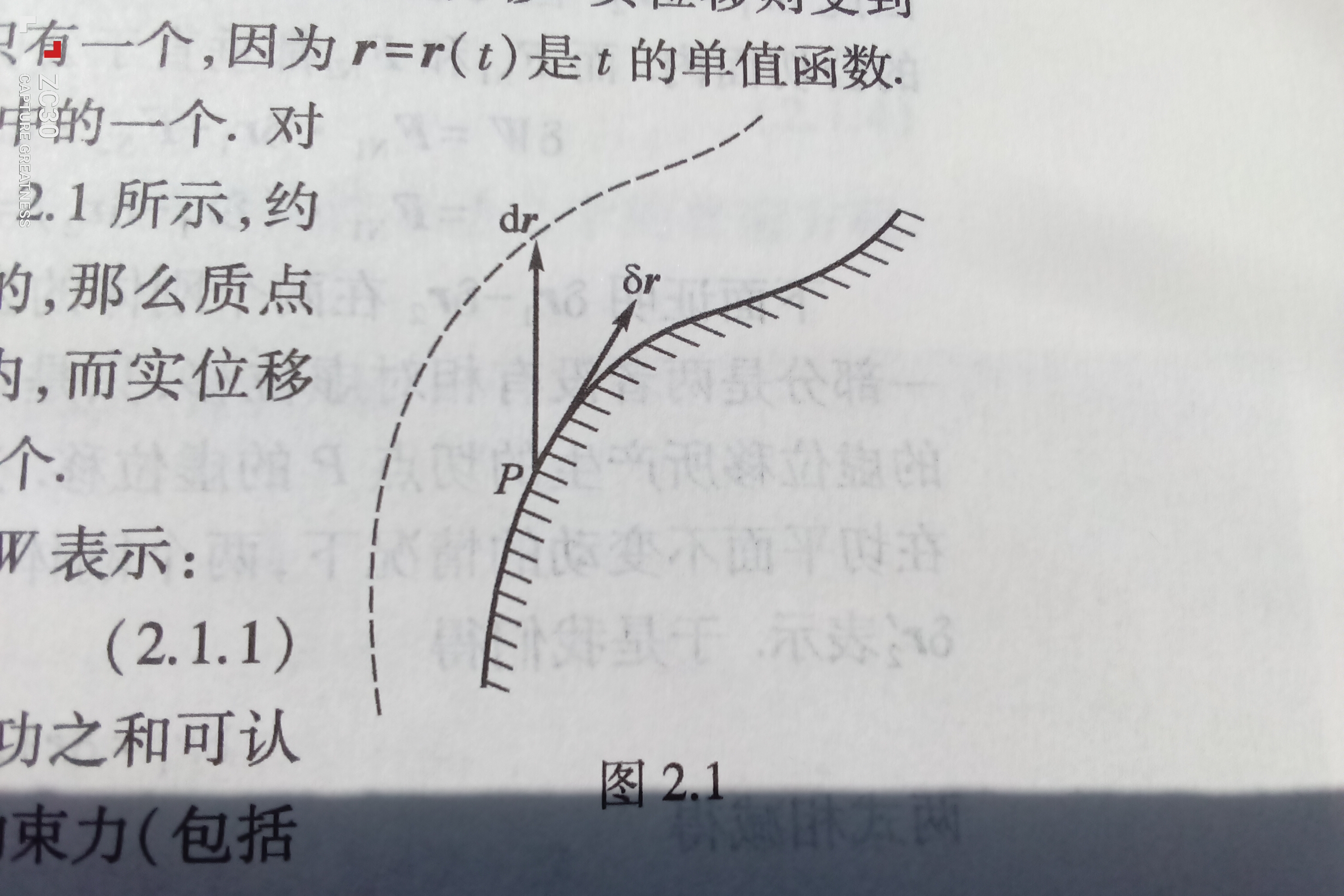
一个质点在$dt$时间内做的实际的位移,称作实位移,用 $\mathrm{d}\mathbf{r}$ 表示。以前我们都是在这一意义下使用 $\mathrm{d}\mathbf{r}$ 这一符号的。想象在某一时刻 $t$,质点发生一个约束所许可的无限小位移,这一位移不是由于质点实际的运动所产生的,它不需要时间,只要满足质点在此时刻的运动学约束条件即可。这种位移称为虚位移,用 $\delta\mathbf{r}$ 表示。算符 $\delta$ 的运算规则是:作用在空间坐标上时和微分算符 $\mathrm{d}$ 的运算规则一样,作用在时间 $t$ 上时则为零,即 $\delta t = 0$。因此 $\delta\mathbf{r}$ 有时也称为等时变分。
一般来说,在任一瞬间,质点的虚位移可以不止一个。譬如质点被约束在一曲面上,那么只要不离开此曲面,质点可以在各个方向上发生虚位移。实位移则受到运动定律的限制,当时间改变 $\mathrm{d}t$ 后,实位移只有一个,因为 $\mathbf{r} = \mathbf{r}(t)$ 是 $t$ 的单值函数。
如果约束稳定,实位移 $\mathrm{d}\mathbf{r}$ 是许多虚位移中的一个。对于不稳定约束,实位移和虚位移不一致。如图 2.1 所示,约束在曲面上的一个质点,若曲面本身是运动的,那么质点的虚位移 $\delta\mathbf{r}$ 处在该时刻质点所在的切平面内,而实位移 $\mathrm{d}\mathbf{r}$ 不在这一平面内,因而 $\mathrm{d}\mathbf{r}$ 就不是 $\delta\mathbf{r}$ 中的一个。
力 $\mathbf{F}$ 在虚位移下所做的功称为虚功,用 $\delta W$ 表示:$\delta W = \mathbf{F} \cdot \delta\mathbf{r}.\tag{2.1.1}$
有一类理想约束体系,其内外约束力所做的虚功之和可认为是零。我们用 $\mathbf{F}_{Ni}$ 表示第 $i$ 个质点所受到的约束力(包括体系内部的约束力和外界对体系的约束力),那么理想约束可定义为
$\sum_i \mathbf{F}_{Ni} \cdot \delta\mathbf{r}_i = 0.\tag{2.1.2}$
下列几种约束都是理想约束。
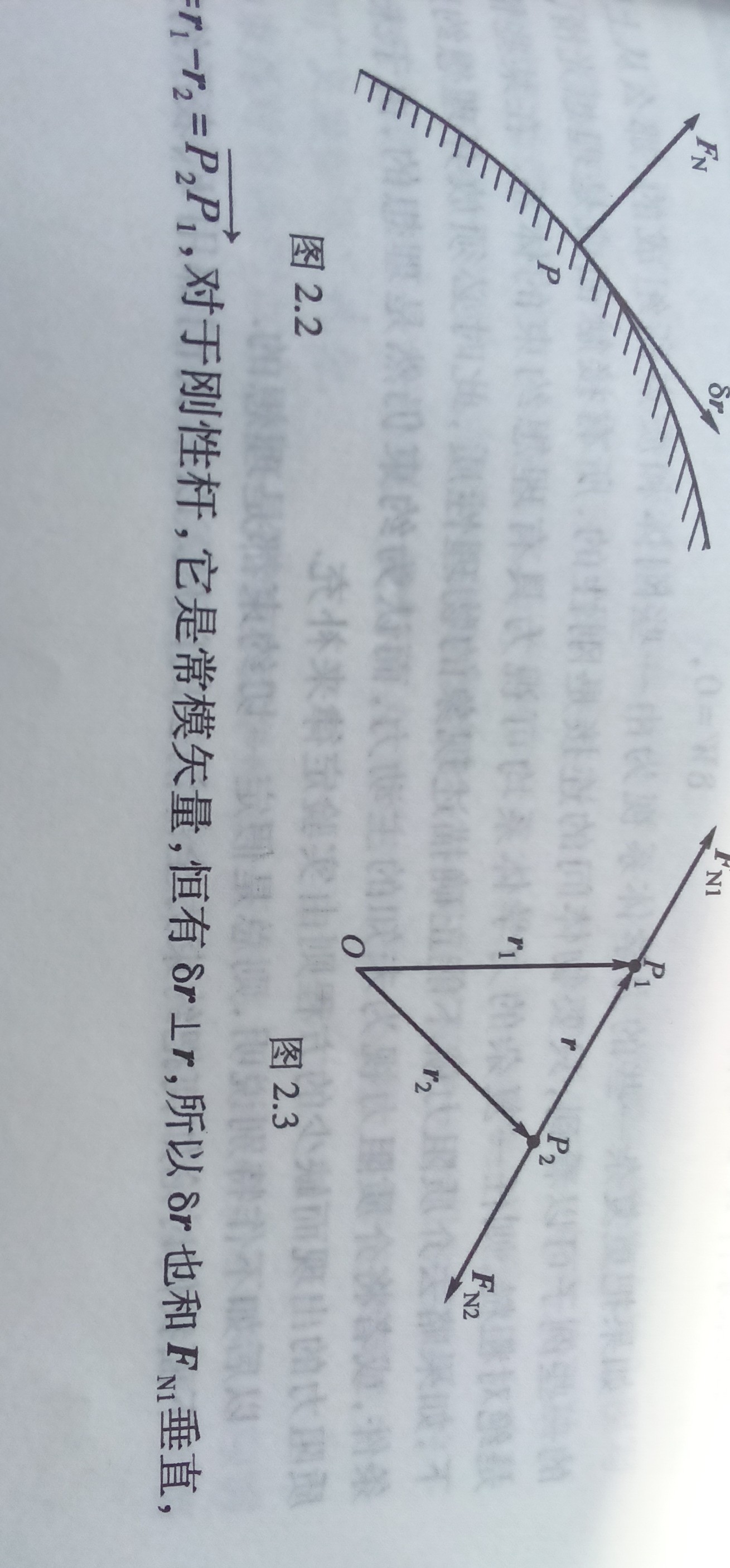
(1) 质点沿光滑曲面运动,如图 2.2 所示。该曲面对质点的约束力 $\mathbf{F}_N$ 在曲面的法线方向,不论该曲面是静止不变的,还是随时间变化的,质点的虚位移 $\delta\mathbf{r}$ 恒在曲面的切线方向。因此
$\delta W = \mathbf{F}_N \cdot \delta\mathbf{r} = 0.$
(2) 质量可忽略的刚性杆所连接的两个质点。如图 2.3 所示,用 $\mathbf{F}_{N1}$ 和 $\mathbf{F}_{N2}$ 表示杆作用在质点 $P_1$ 和 $P_2$ 上的约束力,其方向在 $P_1P_2$ 的连线方向,根据牛顿第三定律,$\mathbf{F}_{N1} = -\mathbf{F}_{N2}$,因此
$\delta W = \mathbf{F}_{N1} \cdot \delta\mathbf{r}_1 + \mathbf{F}_{N2} \cdot \delta\mathbf{r}_2 = \mathbf{F}_{N1} \cdot \delta\mathbf{r},$
其中 $\delta\mathbf{r} = \delta\mathbf{r}_1 - \delta\mathbf{r}_2$。由于刚性杆长度不变,有 $\delta\mathbf{r} \perp \mathbf{r}$,所以 $\delta\mathbf{r}$ 也和 $\mathbf{F}_{N1}$ 垂直,故 $\delta W = 0$。
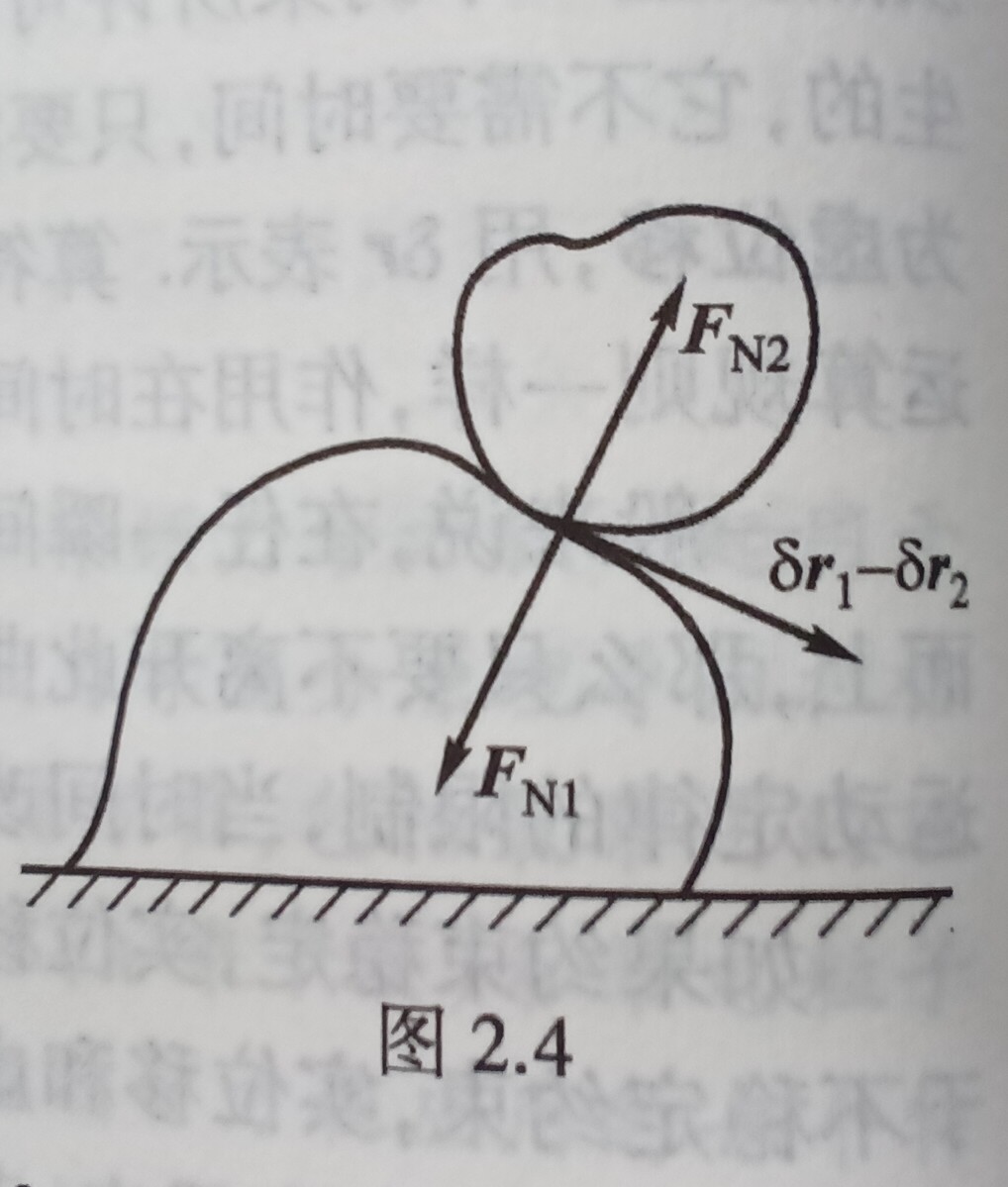
(3) 两个刚体以光滑表面接触,如图 2.4 所示,仍用 $\mathbf{F}_{N1}$ 和 $\mathbf{F}_{N2}$ 表示两个刚体相互间的作用力和反作用用力,则 $\mathbf{F}_{N1} + \mathbf{F}_{N2} = 0$。由于两个刚体是光滑的,可有相对滑动,因此 $\delta\mathbf{r}_1 \neq \delta\mathbf{r}_2$。但可以证明 $\delta\mathbf{r}_1 - \delta\mathbf{r}_2$ 在两个刚体接触点的公切面内。而 $\mathbf{F}_{N1}$ 和 $\mathbf{F}_{N2}$ 都垂直于公切面,因此
$\delta W &= \mathbf{F}_{N1} \cdot \delta\mathbf{r}_1 + \mathbf{F}_{N2} \cdot \delta\mathbf{r}_2$
$= \mathbf{F}_{N1} \cdot (\delta\mathbf{r}_1 - \delta\mathbf{r}_2) = 0.$
下面证明 $\delta\mathbf{r}_1 - \delta\mathbf{r}_2$ 在两个刚体的公切面内。我们可把 $\delta\mathbf{r}_1$ 和 $\delta\mathbf{r}_2$ 分解为两部分:一部分是两者没有相对虚位移,只是切平面有一虚位移。我们用 $\delta\mathbf{r}$ 表示由切平面的虚位移所产生的切点 $P$ 的虚位移,这一虚位移是两者共同的。另一部分虚位移是在切平面不变动的情况下,两个刚体各自在切平面内的虚位移,我们分别用 $\delta\mathbf{r}_1'$ 和 $\delta\mathbf{r}_2'$ 表示。于是我们得
$\delta\mathbf{r}_1 = \delta\mathbf{r} + \delta\mathbf{r}_1',\quad \delta\mathbf{r}_2 = \delta\mathbf{r} + \delta\mathbf{r}_2'.$
两式相减得
$\delta\mathbf{r}_1 - \delta\mathbf{r}_2 = \delta\mathbf{r}_1' - \delta\mathbf{r}_2'.$
由于 $\delta\mathbf{r}_1'$ 和 $\delta\mathbf{r}_2'$ 都是在公切面内的虚位移,因而 $\delta\mathbf{r}_1' - \delta\mathbf{r}_2'$ 必定在公切面内,所以 $\delta\mathbf{r}_1 - \delta\mathbf{r}_2$ 也一定在公切面内。
(4) 两个物体以完全粗糙的表面相接触(不能有滑动,只能作纯滚动),此时接触点的相对速度 $\mathbf{v}_2 - \mathbf{v}_1 = 0$,约束条件为 $\delta\mathbf{r}_2 - \delta\mathbf{r}_1 = 0$,因此
$\delta W = \mathbf{F}_{N1} \cdot \delta\mathbf{r}_1 + \mathbf{F}_{N2} \cdot \delta\mathbf{r}_2 = \mathbf{F}_{N1} \cdot (\delta\mathbf{r}_1 - \delta\mathbf{r}_2) = 0.$
\]
(5) 两个质点以柔软而不可伸长的绳子相连接。以 §1.3 图 1.7 所示的题为例,用 $\mathbf{r}_1$ 和 $\mathbf{r}_2$ 分别表示质点 $m$ 和 $m'$ 的位置,则
$\delta W &= \mathbf{F}_{T1} \cdot \delta\mathbf{r}_1 + \mathbf{F}_{T2} \cdot \delta\mathbf{r}_2 $
$= (-F_T \mathbf{e}_R) \cdot (\delta R \mathbf{e}_R + R \delta\varphi \mathbf{e}_\varphi) + F_T \mathbf{k} \cdot \delta z \mathbf{k} $
$= -F_T \delta R + F_T \delta z.$
利用约束条件 $R - z = l$,得 $\delta R = \delta z$,代入上式即得
$\delta W = 0,$
如果把更复杂一些的力学体系视为由一些刚体和质点所组成的,那么从上面的一些例子可以看到,只要物体间的连接是刚性的,所有接触面或是理想光滑,或是绝对粗糙,则任一复杂的力学体系均可视为具有理想约束的体系。在某些情况下,如果略去介质阻力就不能正确描述现象的物理性质,此时必须放弃理想约束的条件,或者将介质阻力视为未知的主动力,而认为约束仍然是理想的,由于未知介质阻力的出现而缺少的方程则由实验定律来补充。如不作特别说明,则总是假定一切约束都是理想的。
下面讨论如何把约束力全部消去的问题。以后都用 $\mathbf{F}_N$ 表示约束力,$\mathbf{F}$ 表示主动力。受约束的质点系中每一个质点的运动方程可写为
$m_i \ddot{\mathbf{r}}_i = \mathbf{F}_i + \mathbf{F}_{Ni},\quad i = 1,2,\cdots,n,$
上式可改写为
$\mathbf{F}_i + \mathbf{F}_{Ni} - m_i \ddot{\mathbf{r}}_i = 0,\quad i = 1,2,\cdots,n.\tag{2.1.3}$
给体系以虚位移 $\delta\mathbf{r}_i$,由 (2.1.3) 式可得
$\sum_i (\mathbf{F}_i + \mathbf{F}_{Ni} - m_i \ddot{\mathbf{r}}_i) \cdot \delta\mathbf{r}_i = 0.$
如果约束是理想的,则由定义 (2.1.2),上式可写为
$\sum_i (\mathbf{F}_i - m_i \ddot{\mathbf{r}}_i) \cdot \delta\mathbf{r}_i = 0.\tag{2.1.4}$
这个方程称为达朗贝尔方程,这是理想约束体系动力学的普遍方程,约束力在方程中已不再出现了。
补充说明:这部分是学金尚年理论力学时记的笔记,图片会补在评论区
共3条回复
时间正序