物理 保守力学体系下的拉格朗日方程
![]()
![]()
![]()
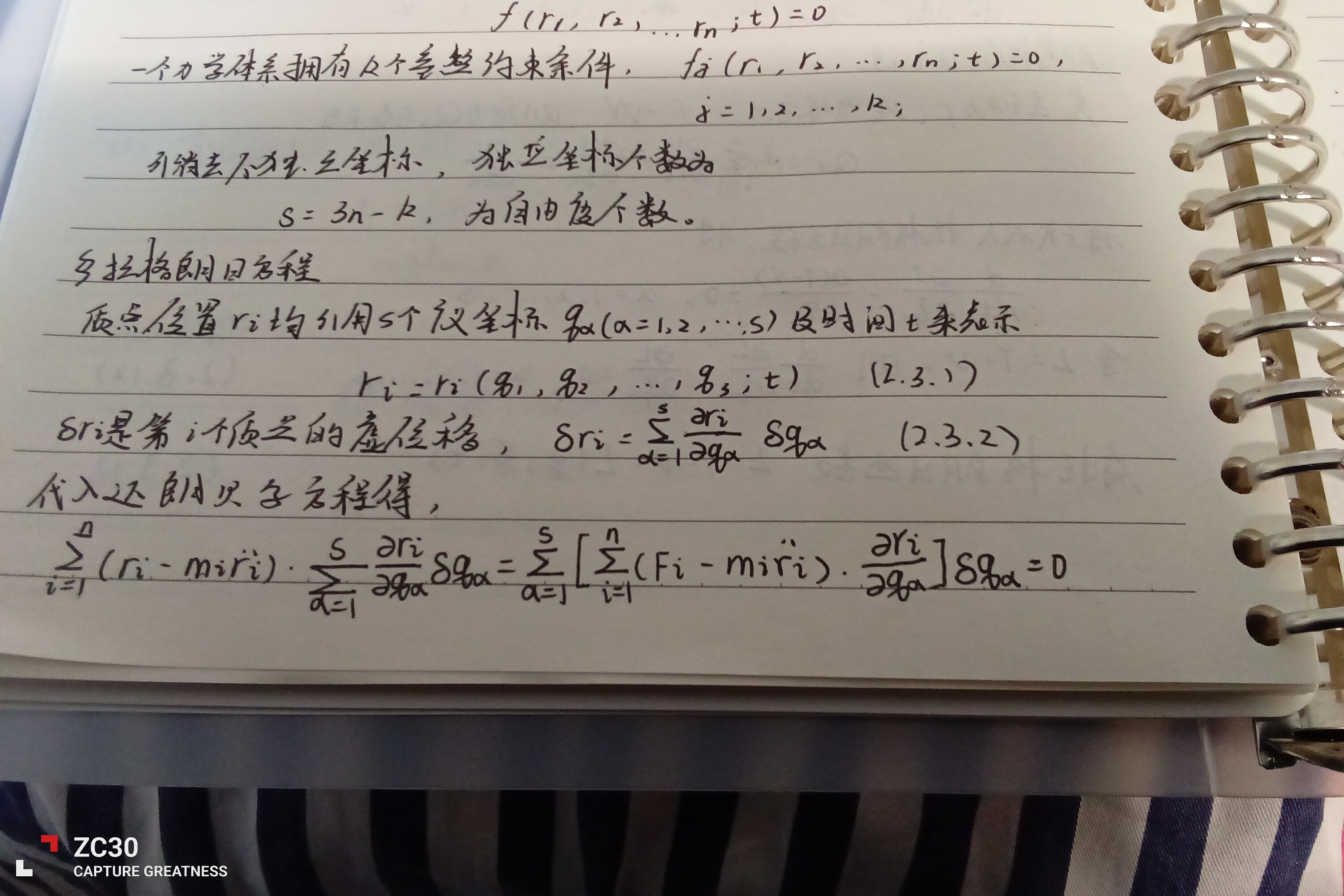
直接用广义坐标表示的动力学方程称为拉格朗日方程。首先讨论体系的约束是理想的和完整的情况。在这种情况下,我们只要将完整约束的条件代入到理想约束体系的达朗贝尔方程 中去,消去其中的不独立坐标后即得拉格朗日方程。
我们以 $ q_1, q_2, \cdots, q_s $ 表示由 $ k $ 个完整约束方程消去 $ k $ 个不独立坐标后,留下的 $ s = 3n - k $ 个独立坐标,即广义坐标。只要每一个广义坐标的值确定后,整个体系的位置就完全确定了,体系中每一个质点的位置 $ \mathbf{r}_i $ 均可用 $ s $ 个广义坐标 $ q_\alpha (\alpha = 1, 2, \cdots, s) $ 及时间 $ t $ 来表示:$\mathbf{r}_i = \mathbf{r}_i(q_1, q_2, \cdots, q_s; t)$
因此,利用上式将达朗贝尔方程中的 $ \delta \mathbf{r}_i $ 和 $ \dot{\mathbf{r}}_i $ 用 $ q_\alpha $ 及其微分来表示即可导出拉格朗日方程。
$ \delta \mathbf{r}_i $ 是第 $ i $ 个质点的虚位移。因此,从上式可得:
$\delta \mathbf{r}_i = \sum_{\alpha=1}^s \frac{\partial \mathbf{r}_i}{\partial q_\alpha} \delta q_\alpha$
将上式代入达朗贝尔方程,得:
$\sum_{i=1}^n \left( \mathbf{F}_i - m_i \ddot{\mathbf{r}}_i \right) \cdot \sum_{\alpha=1}^s \frac{\partial \mathbf{r}_i}{\partial q_\alpha} \delta q_\alpha = \sum_{\alpha=1}^s \left[ \sum_{i=1}^n \left( \mathbf{F}_i - m_i \ddot{\mathbf{r}}_i \right) \cdot \frac{\partial \mathbf{r}_i}{\partial q_\alpha} \right] \delta q_\alpha = 0$
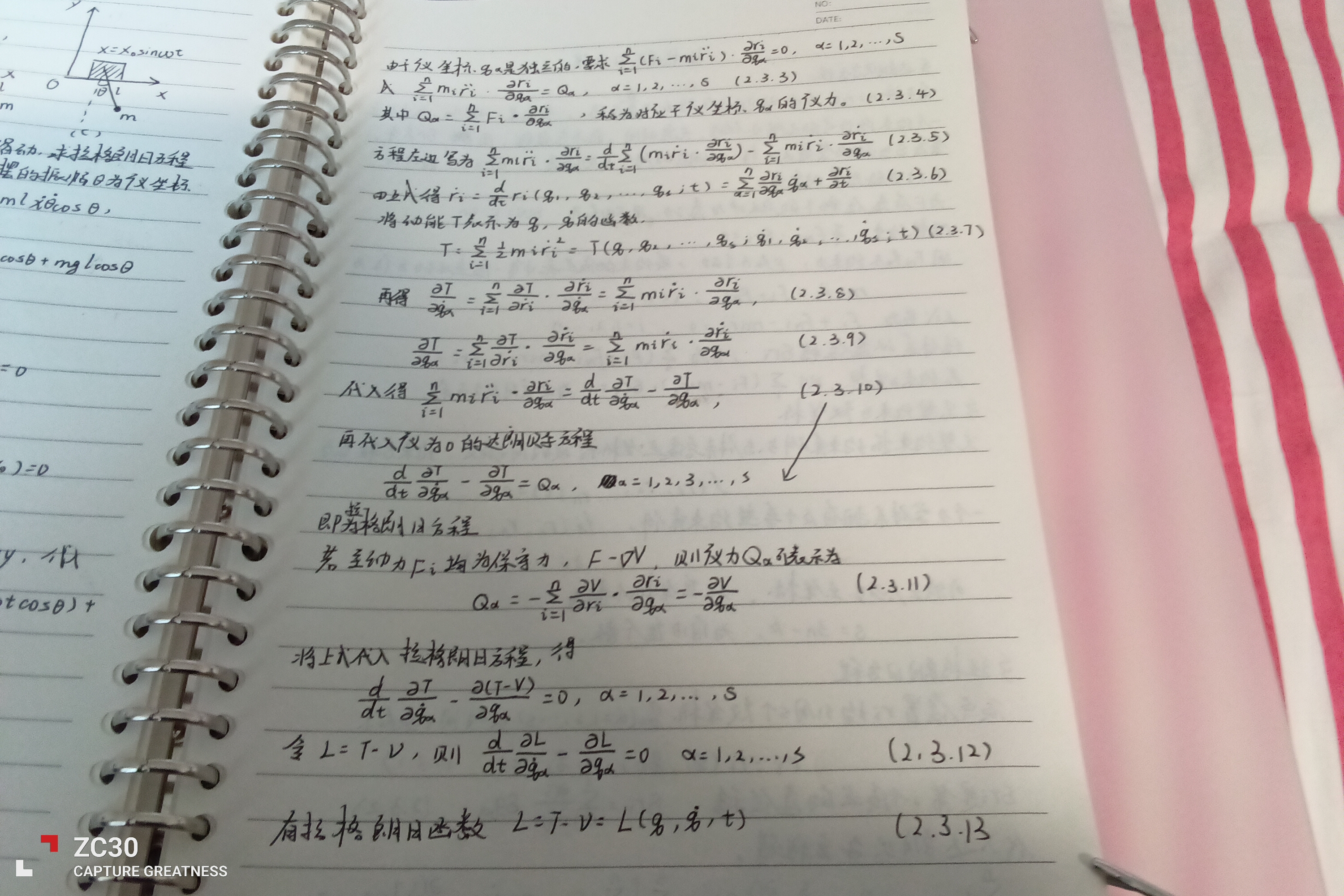
由于广义坐标 $ q_\alpha $ 都是独立的,因此要使上式成立,必须使每一项 $ \delta q_\alpha $ 的系数都为零,即要求:
$\sum_{i=1}^n \left( \mathbf{F}_i - m_i \ddot{\mathbf{r}}_i \right) \cdot \frac{\partial \mathbf{r}_i}{\partial q_\alpha} = 0, \quad \alpha = 1, 2, \cdots, s$,式中$Q_\alpha = \sum_{i=1}^n \mathbf{F}_i \cdot \frac{\partial \mathbf{r}_i}{\partial q_\alpha}$
称为对应于广义坐标 $ q_\alpha $ 的广义力。(2.3.3) 共有 $ s $ 个方程,这 $ s $ 个方程和达朗贝尔方程等价。
方程的左边可改写为:
$\sum_{i=1}^n m_i \ddot{\mathbf{r}}_i \cdot \frac{\partial \mathbf{r}_i}{\partial q_\alpha} = \frac{d}{dt} \sum_{i=1}^n \left( m_i \dot{\mathbf{r}}_i \cdot \frac{\partial \mathbf{r}_i}{\partial q_\alpha} \right) - \sum_{i=1}^n m_i \dot{\mathbf{r}}_i \cdot \frac{\partial \dot{\mathbf{r}}_i}{\partial q_\alpha}$
另一方面,由第一个式子得:
$\dot{\mathbf{r}}_i = \frac{d}{dt} \mathbf{r}_i(q_1, q_2, \cdots, q_s; t) = \sum_{\alpha=1}^s \frac{\partial \mathbf{r}_i}{\partial q_\alpha} \dot{q}_\alpha + \frac{\partial \mathbf{r}_i}{\partial t}$
于是可将动能 $ T $ 表示为 $ q, \dot{q} $ 的函数:
$T = \sum_{i=1}^n \frac{1}{2} m_i \dot{\mathbf{r}}_i^2 = T(q_1, q_2, \cdots, q_s; \dot{q}_1, \dot{q}_2, \cdots, \dot{q}_s; t)$
由上述两式可得:
$\frac{\partial T}{\partial \dot{q}_\alpha} = \sum_{i=1}^n \frac{\partial T}{\partial \dot{\mathbf{r}}_i} \cdot \frac{\partial \dot{\mathbf{r}}_i}{\partial \dot{q}_\alpha} = \sum_{i=1}^n m_i \dot{\mathbf{r}}_i \cdot \frac{\partial \mathbf{r}_i}{\partial q_\alpha}$
$\frac{\partial T}{\partial q_\alpha} = \sum_{i=1}^n \frac{\partial T}{\partial \dot{\mathbf{r}}_i} \cdot \frac{\partial \dot{\mathbf{r}}_i}{\partial q_\alpha} = \sum_{i=1}^n m_i \dot{\mathbf{r}}_i \cdot \frac{\partial \dot{\mathbf{r}}_i}{\partial q_\alpha}$
将上述两式代入达朗贝尔方程左式得:
$\sum_{i=1}^n m_i \ddot{\mathbf{r}}_i \cdot \frac{\partial \mathbf{r}_i}{\partial q_\alpha} = \frac{d}{dt} \frac{\partial T}{\partial \dot{q}_\alpha} - \frac{\partial T}{\partial q_\alpha},$
再代入得:
$\frac{d}{dt} \frac{\partial T}{\partial \dot{q}_\alpha} - \frac{\partial T}{\partial q_\alpha} = Q_\alpha, \quad \alpha = 1, 2, \cdots, s$
这就是保守力学体系的拉格朗日方程。
如果主动力 $ \mathbf{F}_i $ 均为保守力,$ \mathbf{F} = -\nabla V $,则 (2.3.4) 式中的广义力 $ Q_\alpha $ 可表示为:
$Q_\alpha = -\sum_{i=1}^n \frac{\partial V}{\partial \mathbf{r}_i} \cdot \frac{\partial \mathbf{r}_i}{\partial q_\alpha} = -\frac{\partial V}{\partial q_\alpha}$
将上式代入拉格朗日方程,得:
$\frac{d}{dt} \frac{\partial T}{\partial \dot{q}_\alpha} - \frac{\partial (T - V)}{\partial q_\alpha} = 0, \quad \alpha = 1, 2, \cdots, s$
通常势能 $ V $ 仅为位置和时间的函数,与粒子的速度无关,$ \frac{\partial V}{\partial \dot{q}_\alpha} = 0 $。因此如令 $ L = T - V $,则拉格朗日方程可改写为:
$\frac{d}{dt} \frac{\partial L}{\partial \dot{q}_\alpha} - \frac{\partial L}{\partial q_\alpha} = 0, \quad \alpha = 1, 2, \cdots, s$
必须注意: $ T $ 表示为 $ q_\alpha, \dot{q}_\alpha $ 和 $ t $ 的函数;式也表明 $ V $ 只是广义力 $ q_\alpha $ 的函数。因此拉格朗日方程中的动能和势能都必须用广义坐标来表示,否则并不能由上两个拉格朗日方程式得出正确的动力学方程。在这样的意义下,函数
$L = T - V = L(q, \dot{q}, t)$
称为体系的拉格朗日函数。
倒数第二个式子是最常用的一种拉格朗日方程。从导出的过程中可以看到,它成立的条件是:体系所受的约束是理想和完整的,主动力都是保守力。但我们把理想约束和主动力是保守力这两个条件,与体系是保守的,两者看成是等价的。对此需要进一步讨论。