

共6条回复
时间正序
- 时间正序
- 时间倒序
- 评论最多
2条评论
- 1
三等分的伊文斯
2年前
2024-5-8 15:54:22
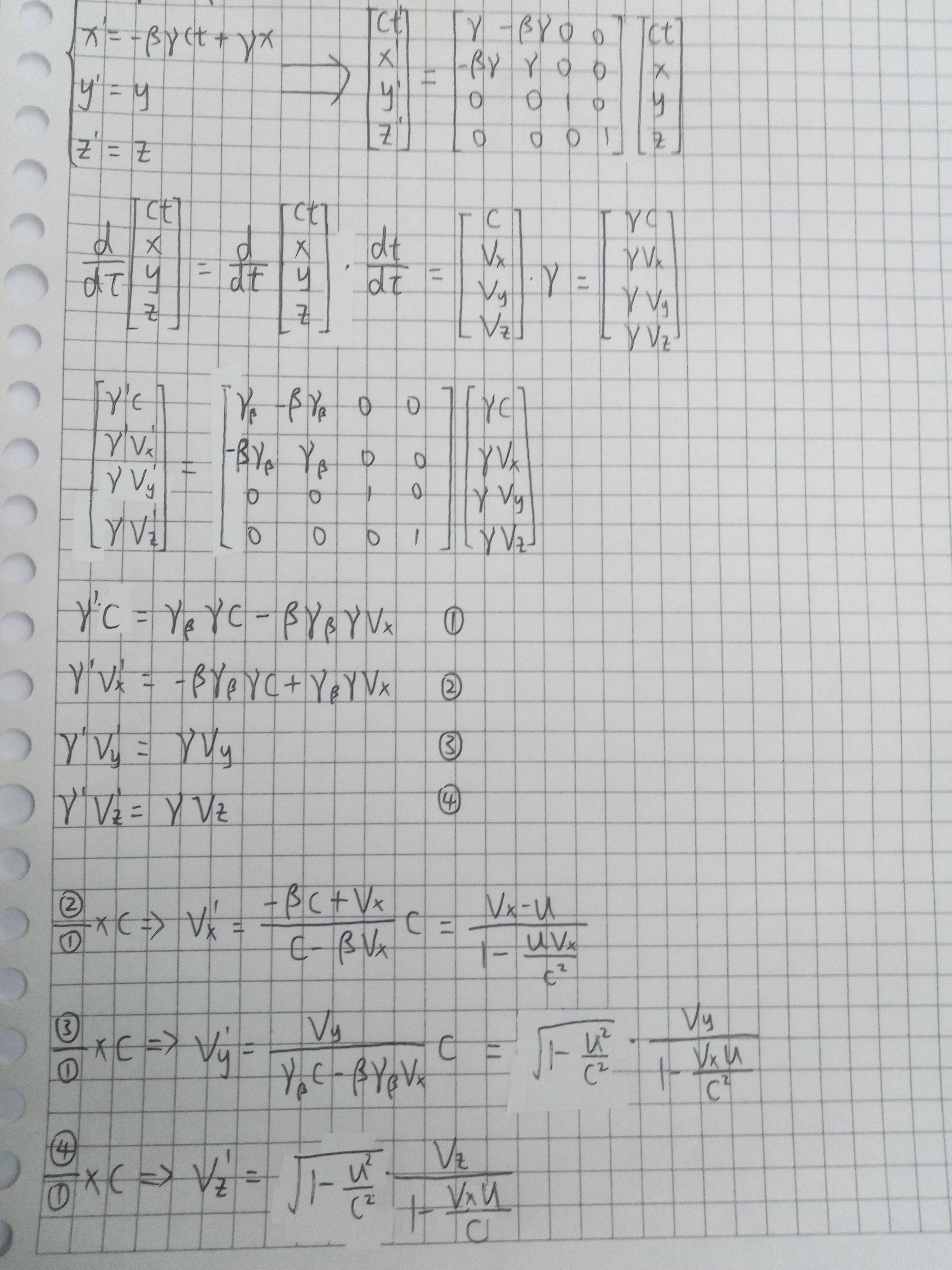
虽然这个错误是正常人都看得出来,但还是想补一句水稻姐的笔记中下半Y方向和z方向的速度前应该是γ一撇(她应该是手误抄漏了)
想借这个贴问个问题。我没搞太清楚这里dt/dτ为什么是γ一撇而不是γ?
7条评论
凡
2年前
2024-5-9 05:19:59
没有啊,dt/dτ就是γ呀,dt’/dτ才是γ’
三等分的伊文斯 回复 凡
2年前
2024-5-9 14:10:27
我感觉我脑子是晕的,没搞明白那几个速度是什么。我只知道有相对速度,牵连速度和绝对速度。也不知道那两个γ分别对应啥
凡姐能帮忙给我讲一下吗qwq(话说凡姐是♂还是♀啊,之前曝照伊文斯没看到,哭)
还没有昵称 回复 三等分的伊文斯
2年前
2024-5-9 14:26:20
凡姐有爆照吗?
我怎么没看到(盯)
以及某人放的是我的照片(雾)
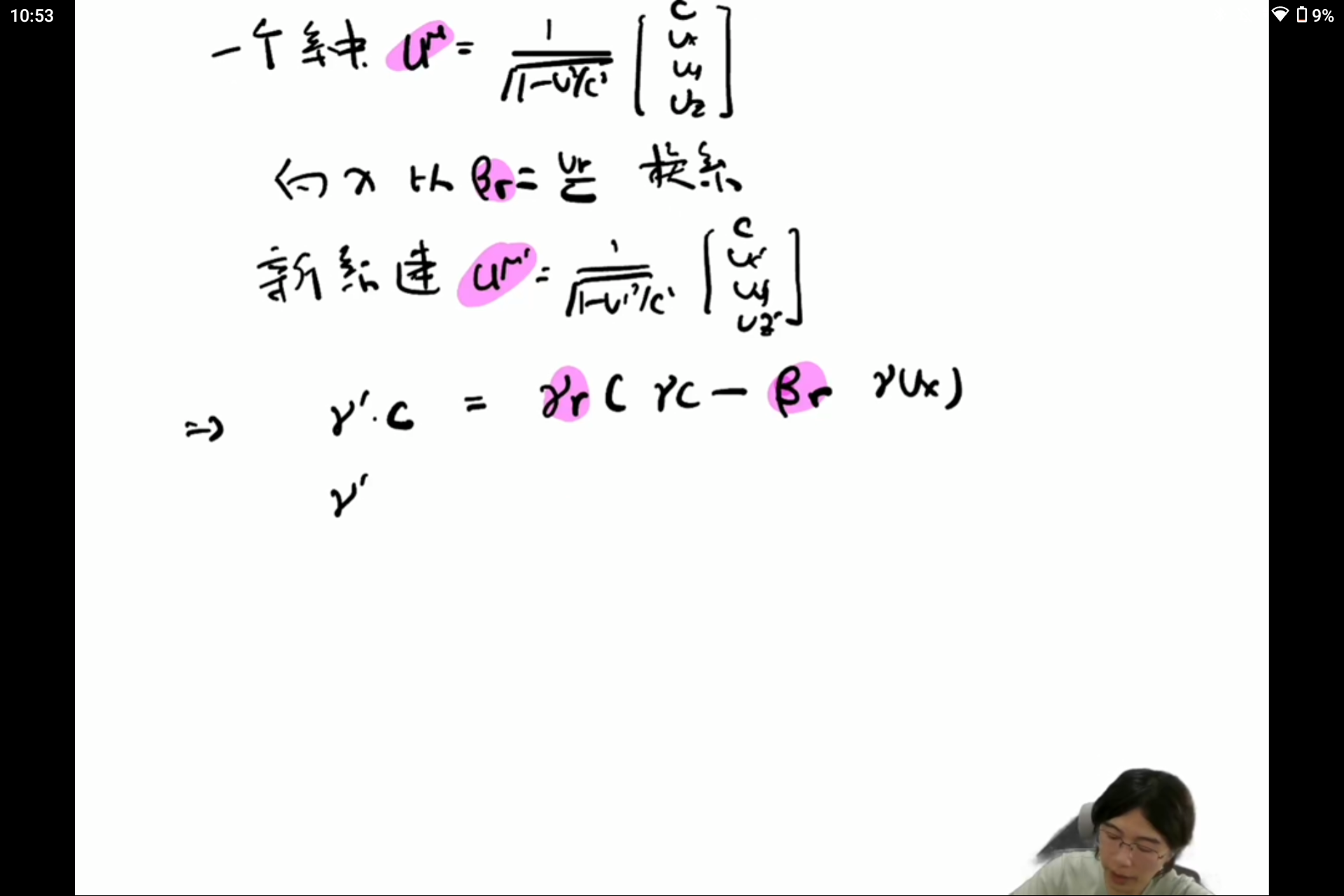
伽马就是在s系中系的速度v对应
带撇就是s撇系的速度
至于怎么变就洛伦兹变换或者钟慢也行
详情看我发你那个链接(wx上见)
以及某人性别要看导儿最新那个帖
三等分的伊文斯 回复
2年前
2024-5-9 14:31:02
我是听宸姐说的他爆过好几次了
谢谢rain啦,主要是不会用四维矢量,哭。S撇系的速度是指S撇相对于s系的速度吗?但是我记得里面说过有三个速度。
凡 回复 三等分的伊文斯
2年前
2024-5-9 14:40:48
四维速度
我什么时候爆过照了,我爆的分明就都是小rain的照(自豪)。不要问人家的个人信息啦,人家会害羞的。
还没有昵称 回复 三等分的伊文斯
2年前
2024-5-9 15:50:43
。。。
系相对系的速度是认为沿x轴
三等分的伊文斯 回复
2年前
2024-5-10 04:56:10
唉,伊文斯太笨了(๑˃̥̩̥̥̥̥̆ಐ˂̩̩̥̥̩̥̆৭)我还是没有搞太明白,就不耽误小rain了![]() 我下来再自己想一想。
我下来再自己想一想。